kvm系统的前端是qemu-kvm,工作在用户空间,给用户提供一套方便的kvm虚拟化工具集合。下面来介绍一下qemu-kvm-0.11.0的编译过程。
1、下载
wget http://sourceforge.net/projects/kvm/files/qemu-kvm/0.11.0/qemu-kvm-0.11.0.tar.gz/download
mv download qemu-kvm-0.11.0.tar.gz
tar -xzvf qemu-kvm-0.11.0.tar.gz
2、安装其他库
sudo apt-get installlibpci-dev
sudo apt-get iinstalllibsdl1.2-dev
下载zlib-1.2.3.tar.gz
解压tar zxvf zlib-1.2.3.tar.gz
进入目录配置安装:
./configure
make
sudo make install
安装。
3、编译安装qemu
cd qemu-kvm-0.11.0
./configure
make
sudo make install
4、将qemu添加到环境变量
进入目录/usr/local/bin
为qemu-system-x86_64创建符号链接:
$ sudo ln -s qemu-system-x86_64qem
打开/etc/profile文件在末尾添加
PATH="$PATH:/usr/local/bin"
exportPATH
使环境变量生效,在终端输入:
source /etc/profile
另外打开一个终端输入qemu可见可以正常启动。
但是发现这时提示找不到kvm。
Ubuntu10.10系统有自带的kvm内核模块。
打开文件/etc/modules
在其中加入想要加载的模块名
kvm
kvm-amd
注意不要加扩展名.ko
下载linux内核:
$cd ~/work/
$wget http://www.kernel.org/pub/linux/kernel/v2.6/linux-2.6.35.9.tar.bz2
解压
$tar -jxvf linux-2.6.35.9.tar.bz2
拷贝现有系统的内核配置选项
$ cp /boot/config-2.6.35-22-generic .config
确保如下选项被选中:
在这里建议关闭一个选项:DEBUG_RODATACONFIG_DEBUG_RODATA = n该选项是将内核的一些内存区域空间设置为只读,这样可能导致kgdb的设置软断点功能失效。所以推荐将该选项关闭。
Location:
-> Kernel hacking ->Write protect kernel read-only data structures
KGDB_SERIAL_CONSOLE打开该选项:使用串口进行通信
位置:> Kernel hacking
-> KGDB: kernel debugger
-> KGDB: use kgdb over the serial console
KGDB_LOW_LEVEL_TRAP使能该选项可以kgdb不依赖notifier_call_chain()机制来获取断点异常,这样就可以对notifier_call_chain()机制实现相关的函数进行单步调试。
依赖: KGDB [=y] && (X86 [=y] || MIPS [=MIPS])
位置:-> Kernel hacking
-> KGDB: kernel debugger (KGDB [=y])
->KGDB: Allow debugging with traps in notifiers
DEBUG_INFO该选项可以使得编译的内核包含一些调试信息,使得调试更容易。
位置:
-> Kernel hacking
->compile the kernel with debuginfo
FRAME_POINTER使能该选项将使得内核使用帧指针寄存器来维护堆栈,从而就可以正确地执行堆栈回溯,即函数调用栈信息。
位置:
-> Kernel hacking
->Compile the kernel with frame pointers
MAGIC_SYSRQ(如果你选择了KGDB_SERIAL_CONSOLE,这个选项将自动被选上)激活"魔术SysRq"键.该选项对kgdboc调试非常有用,kgdb向其注册了‘g’魔术键来激活kgdb。
位置:
-> Kernel hacking
->magic SysRq key
当你想手动激活kgdb时,你可以触发SysRq的g键,如:
$ echo "g" > /proc/sysrq-trigger
修改编译优化等级:
打开根目录下Makefile文件修改内核Makefile优化选项将KBUILD_CFLAGS += -O2,修改为:KBUILD_CFLAGS += -O。
编译内核:
make && make modules
编译完成后,复制bzImage和vmlinux到工作目录下备用
cp arch/x86/boot/bzImage.
cp vmlinux.
编译busybox:
cd~/work/busy/
下载busybox-1.20.1.tar.bz2,
解压缩:
tar -jxvfbusybox-1.20.1.tar.bz2
进入busybox目录:
$ cd busybox-1.20.1/
编译busybox
make menuconfig
Busybox Settings--->
Build Options --->
[ * ] Build BusyBox as a static binary (no shared libs)
Installation Options --->
[ * ] Don't use /usr
Miscellaneous Utilities--->
[ ] flashcp
[ ] flash_lock
[ ] flash_unlock
[ ] flash_eraseall
注:[ ]表示不选择
保存配置文件后开始编译和安装
make
make install
此时在当前目录下生成了一个_install目录,里面就是busybox的执行文件
制作文件系统
使用如下命令来创建一个虚拟文件系统磁盘文件,
在当前目录下创建一个名为busybox.img,大小为300M的文件,并将其格式化为ext3的文件系统
dd if=/dev/zero of=./busybox.img bs=1Mcount=300
mkfs.ext3 busybox.img
将这个虚拟磁盘文件到本地系统中,这样我们可以像访问本地文件一样访问它,并将生成好的busybox的文件拷贝到这个文件里。
sudo mkdir /mnt/disk
sudo mount -o loop busybox.img /mnt/disk
sudo cp -rf /dir/to/busybox-1.17.0/_install/* /mnt/disk
创建必须的文件系统目录
cd /mnt/disk/
sudo mkdir dev sys proc etc lib mnt
使用busybox默认的设置文件
sudo cp -a/dir/to/busybox-1.17.0/examples/bootfloppy/etc/* /mnt/disk/etc
sudo vi /mnt/disk/etc/init.d/rcS
将下面内容拷贝到rcS里:
-
#!/bin/sh
-
-
MAC=08:90:90:59:62:21
-
-
IP=192.168.100.2
-
-
Mask=255.255.255.0
-
-
Gateway=192.168.100.1
-
-
-
-
/sbin/ifconfiglo127.0.0.1
-
-
ifconfigeth0down
-
-
ifconfigeth0hwether$MAC
-
-
ifconfigeth0$IPnetmask$Maskup
-
-
routeadddefaultgw$Gateway
-
-
-
-
/bin/mount-a
-
-
/bin/mount-tsysfssysfs/sys
-
-
/bin/mount-ttmpfstmpfs/dev
-
-
/sbin/mdev-s
-
-
mount-oremount,rw,noatime-n/dev/root/
做完上面对工作后,我们就可以卸载虚拟磁盘文件了。
sudo umount /mnt/disk
使用qemu运行自己编译的内核
qemu -m 512 -kernel bzImage -append “root=/dev/sda” -boot c -hda busybox.img -k en-us
运行如下图所示:

让qemu与主机之间可以ping通:
在主机放入一脚本nettap.sh:
$cd ~
$touchnettap.sh
$gedit nettap.sh
脚本中放入如下内容:
-
tunctl-ugudujian-ttap0
-
ifconfigtap0192.168.100.1up
-
echo1>/proc/sys/net/ipv4/ip_forward
-
iptables-tnat-APOSTROUTING-oeth0-jMASQUERADE
-
iptables-IFORWARD1-itap0-jACCEPT
-
iptables-IFORWARD1-otap0-mstate--stateRELATED,ESTABLISHED-jACCEPT
开机后用root权限执行这个脚本。
用如下脚本启动虚拟机:
qemu -m 512 -kernel bzImage -append "root=/dev/sda" -boot c -hda busybox.img-initrd initrd.img-2.6.35.9-k en-us -net nic -net tap,ifname=tap0,script=no
在虚拟机中ping主机可见可以ping的通:
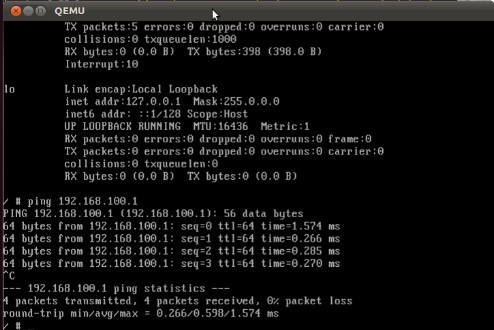
让qemu与主机共享文件(通过tftp方式):
首先在ubuntu10.10中搭建tftp服务:
http://blog.csdn.net/gudujianjsk/article/details/7655701
只是在busybox中使用tftp客户端命令有些不一样。见后面介绍。
使用gdb + kgdb调试内核
使能kgdb可以在内核启动时增加使能参数,这里我们采取在内核启动时增加启动参数(kgdboc=ttyS0,115200 kgdbwait)的方式:
qemu -m 512-kernelbzImage -append
"root=/dev/sda kgdboc=ttyS0,115200
kgdbwait" -boot c –hda busybox.img -k en-us -serial tcp::4321,server
这时,运行qemu的终端将提示等待远程连接到本地端口4321:
QEMU waiting for connection on: tcp:0.0.0.0:4321,server
这时使用另外一个控制台执行:
gdb vmlinux
(gdb) target remote localhost:4321
然后qemu就可以继续正常运行下去,最后停止内核,并显示如下信息:
kgdb: Waiting for connection from remote gdb…
这时gdb这边就可以看到如下的提示:
(gdb) target remote localhost:4321
Remote debugging using localhost:4321
kgdb_breakpoint () at kernel/debug/debug_core.c:983
983 wmb(); /* Sync point after breakpoint */
(gdb)
开始你的内核之旅吧~~~
如果gdb提示如下信息:
warning: Invalid remote reply:
可以使用Ctrl+C来终止当前gdb的操作,再次使用下面命令重新连接一次kgdb即可:
(gdb) target remote localhost:4321
$cd ~/work/
$wget http://www.kernel.org/pub/linux/kernel/v2.6/linux-2.6.35.9.tar.bz2
解压
$tar -jxvf linux-2.6.35.9.tar.bz2
拷贝现有系统的内核配置选项
$ cp /boot/config-2.6.35-22-generic .config
确保如下选项被选中:
在这里建议关闭一个选项:DEBUG_RODATACONFIG_DEBUG_RODATA = n该选项是将内核的一些内存区域空间设置为只读,这样可能导致kgdb的设置软断点功能失效。所以推荐将该选项关闭。
Location:
-> Kernel hacking ->Write protect kernel read-only data structures
KGDB_SERIAL_CONSOLE打开该选项:使用串口进行通信
位置:> Kernel hacking
-> KGDB: kernel debugger
-> KGDB: use kgdb over the serial console
KGDB_LOW_LEVEL_TRAP使能该选项可以kgdb不依赖notifier_call_chain()机制来获取断点异常,这样就可以对notifier_call_chain()机制实现相关的函数进行单步调试。
依赖: KGDB [=y] && (X86 [=y] || MIPS [=MIPS])
位置:-> Kernel hacking
-> KGDB: kernel debugger (KGDB [=y])
->KGDB: Allow debugging with traps in notifiers
DEBUG_INFO该选项可以使得编译的内核包含一些调试信息,使得调试更容易。
位置:
-> Kernel hacking
->compile the kernel with debuginfo
FRAME_POINTER使能该选项将使得内核使用帧指针寄存器来维护堆栈,从而就可以正确地执行堆栈回溯,即函数调用栈信息。
位置:
-> Kernel hacking
->Compile the kernel with frame pointers
MAGIC_SYSRQ(如果你选择了KGDB_SERIAL_CONSOLE,这个选项将自动被选上)激活"魔术SysRq"键.该选项对kgdboc调试非常有用,kgdb向其注册了‘g’魔术键来激活kgdb。
位置:
-> Kernel hacking
->magic SysRq key
当你想手动激活kgdb时,你可以触发SysRq的g键,如:
$ echo "g" > /proc/sysrq-trigger
修改编译优化等级:
打开根目录下Makefile文件修改内核Makefile优化选项将KBUILD_CFLAGS += -O2,修改为:KBUILD_CFLAGS += -O。
编译内核:
make && make modules
编译完成后,复制bzImage和vmlinux到工作目录下备用
cp arch/x86/boot/bzImage.
cp vmlinux.
编译busybox:
cd~/work/busy/
下载busybox-1.20.1.tar.bz2,
解压缩:
tar -jxvfbusybox-1.20.1.tar.bz2
进入busybox目录:
$ cd busybox-1.20.1/
编译busybox
make menuconfig
Busybox Settings--->
Build Options --->
[ * ] Build BusyBox as a static binary (no shared libs)
Installation Options --->
[ * ] Don't use /usr
Miscellaneous Utilities--->
[ ] flashcp
[ ] flash_lock
[ ] flash_unlock
[ ] flash_eraseall
注:[ ]表示不选择
保存配置文件后开始编译和安装
make
make install
此时在当前目录下生成了一个_install目录,里面就是busybox的执行文件
制作文件系统
使用如下命令来创建一个虚拟文件系统磁盘文件,
在当前目录下创建一个名为busybox.img,大小为300M的文件,并将其格式化为ext3的文件系统
dd if=/dev/zero of=./busybox.img bs=1Mcount=300
mkfs.ext3 busybox.img
将这个虚拟磁盘文件到本地系统中,这样我们可以像访问本地文件一样访问它,并将生成好的busybox的文件拷贝到这个文件里。
sudo mkdir /mnt/disk
sudo mount -o loop busybox.img /mnt/disk
sudo cp -rf /dir/to/busybox-1.17.0/_install/* /mnt/disk
创建必须的文件系统目录
cd /mnt/disk/
sudo mkdir dev sys proc etc lib mnt
使用busybox默认的设置文件
sudo cp -a/dir/to/busybox-1.17.0/examples/bootfloppy/etc/* /mnt/disk/etc
sudo vi /mnt/disk/etc/init.d/rcS
将下面内容拷贝到rcS里:
-
#!/bin/sh
-
-
MAC=08:90:90:59:62:21
-
-
IP=192.168.100.2
-
-
Mask=255.255.255.0
-
-
Gateway=192.168.100.1
-
-
-
-
/sbin/ifconfiglo127.0.0.1
-
-
ifconfigeth0down
-
-
ifconfigeth0hwether$MAC
-
-
ifconfigeth0$IPnetmask$Maskup
-
-
routeadddefaultgw$Gateway
-
-
-
-
/bin/mount-a
-
-
/bin/mount-tsysfssysfs/sys
-
-
/bin/mount-ttmpfstmpfs/dev
-
-
/sbin/mdev-s
-
-
mount-oremount,rw,noatime-n/dev/root/
做完上面对工作后,我们就可以卸载虚拟磁盘文件了。
sudo umount /mnt/disk
使用qemu运行自己编译的内核
qemu -m 512 -kernel bzImage -append “root=/dev/sda” -boot c -hda busybox.img -k en-us
运行如下图所示:
让qemu与主机之间可以ping通:
在主机放入一脚本nettap.sh:
$cd ~
$touchnettap.sh
$gedit nettap.sh
脚本中放入如下内容:
-
tunctl-ugudujian-ttap0
-
ifconfigtap0192.168.100.1up
-
echo1>/proc/sys/net/ipv4/ip_forward
-
iptables-tnat-APOSTROUTING-oeth0-jMASQUERADE
-
iptables-IFORWARD1-itap0-jACCEPT
-
iptables-IFORWARD1-otap0-mstate--stateRELATED,ESTABLISHED-jACCEPT
开机后用root权限执行这个脚本。
用如下脚本启动虚拟机:
qemu -m 512 -kernel bzImage -append "root=/dev/sda" -boot c -hda busybox.img-initrd initrd.img-2.6.35.9-k en-us -net nic -net tap,ifname=tap0,script=no
在虚拟机中ping主机可见可以ping的通:
让qemu与主机共享文件(通过tftp方式):
首先在ubuntu10.10中搭建tftp服务:
http://blog.csdn.net/gudujianjsk/article/details/7655701
只是在busybox中使用tftp客户端命令有些不一样。见后面介绍。
使用gdb + kgdb调试内核
使能kgdb可以在内核启动时增加使能参数,这里我们采取在内核启动时增加启动参数(kgdboc=ttyS0,115200 kgdbwait)的方式:
qemu -m 512-kernelbzImage -append
"root=/dev/sda kgdboc=ttyS0,115200
kgdbwait" -boot c –hda busybox.img -k en-us -serial tcp::4321,server
这时,运行qemu的终端将提示等待远程连接到本地端口4321:
QEMU waiting for connection on: tcp:0.0.0.0:4321,server
这时使用另外一个控制台执行:
gdb vmlinux
(gdb) target remote localhost:4321
然后qemu就可以继续正常运行下去,最后停止内核,并显示如下信息:
kgdb: Waiting for connection from remote gdb…
这时gdb这边就可以看到如下的提示:
(gdb) target remote localhost:4321
Remote debugging using localhost:4321
kgdb_breakpoint () at kernel/debug/debug_core.c:983
983 wmb(); /* Sync point after breakpoint */
(gdb)
开始你的内核之旅吧~~~
如果gdb提示如下信息:
warning: Invalid remote reply:
可以使用Ctrl+C来终止当前gdb的操作,再次使用下面命令重新连接一次kgdb即可:
(gdb) target remote localhost:4321
分享到:





相关推荐
在VMware中搭建Linux系统内核的调试环境
arm, x86 两个平台的qemu 模拟器的安装,gdb 的安装,内核的编译的核调试 ,包括根文件系统的制作,实测的启动参数
十 使用SkyEye构建Linux内核调试环境 1 SkyEye的安装和μcLinux内核编译 2 使用SkyEye调试 3 使用SkyEye调试内核的特点和不足 十一 KDB 1 入门 2 初始化并设置环境变量 3 激活 KDB 4 KDB 命令 5 技巧和诀窍 6 结束语...
基于A33的GDB+KGDB内核调试环境搭建,此种是以串口方法进行搭建kgdb调试环境的,如果通过网络的话,需要使用到其他的模块
这里说明下,本人调试的内核版本是2.6.11.12,为什么去调试这么“古老”的版本?原因不多说了,你手头也许正拿着ULK3,而它针对的内核版本正是2.6.11,有比这更好的理由吗?而且这个版本不算旧,已不算新,我认为还...
自己搭建的一个可以用gdb调试linux内核的环境,解压后看README,其中有详细的搭建过程。 简单来说就是在一台linux主机上用bochs虚拟机调试内核。 用到的工具: 一台linux主机 bochs源码,压缩包中已有 busybox源码,...
-国嵌体验入门班-1-5(软硬件环境搭建).avi -第2天(开发板快乐体验) -国嵌体验入门班-2-1(开发板系统安装).avi -国嵌体验入门班-2-1(开发板系统安装-Jlink方式).avi -国嵌体验入门班-2-1(开发板系统安装-...
-国嵌体验入门班-1-5(软硬件环境搭建).avi -第2天(开发板快乐体验) -国嵌体验入门班-2-1(开发板系统安装).avi -国嵌体验入门班-2-1(开发板系统安装-Jlink方式).avi -国嵌体验入门班-2-1(开发板系统安装-...
使用kgdb调试linux内核及内核模块
Davinci调试环境的搭建,详细介绍了davinci调试环境搭建过程,包括uboot,ramdisk,交叉编译环境,linux内核编译等
在 Linux 内核开发过程中不...但是很多情况下,我们对问题产生的原因毫无头绪,也就不可能在茫茫的代码中添加printk,这时候我们就依赖于GDB构建Linux内核调试环境。本文以 Linux 4.1.15为例,介绍调试环境的搭建过程。
Linux内核镜像的烧写;交叉编译;搭建QT开发环境;开发板与PC机Linux系统的NFS挂载连接;再就是QT程序在线测试等。 上述中交叉编译之前的所有操作本文不涉及,读者如有不明之处请另找资料,本文意在构建一个QT开发...
1. 远程调试环境的搭建原理 2. 使用GDB 3. Linux内核调试 4. 实验 实验一:利用GDB进行本地调试 实验二:利用GDB进行远程调试 实验三:arm-linux内核调试
linux0.11内核源码分析,其中包括两部分,一部分是源码,另一部分是源码的详述,文档中也有环境搭建的介绍,便于运行和调试;适用于想了解linux内核的初学者,和了解linux的运行机理,阅读代码,会更直接!
1.5.1 Linux内核的主要模块 7 1.5.2 Linux的文件结构 9 1.6 GNU通用公共许可证 10 1.6.1 GPL许可证的历史 10 1.6.2 GPL的自由理念 10 1.6.3 GPL的基本条款 11 1.6.4 关于GPL许可证的争议 12 1.7 Linux...
1.5.1 Linux内核的主要模块 7 1.5.2 Linux的文件结构 9 1.6 GNU通用公共许可证 10 1.6.1 GPL许可证的历史 10 1.6.2 GPL的自由理念 10 1.6.3 GPL的基本条款 11 1.6.4 关于GPL许可证的争议 12 1.7 Linux...
接着系统地讲解了嵌入式Linux的环境搭建,以及嵌入式Linux的I/O与文件系统的开发、进程控制开发、进程间通信开发、网络应用开发、基于中断的开发、设备驱动程序的开发以及嵌入式图形界面的开发等,并且还安排了丰富...
Linux内核 Linux3.0.15 系统引导程序 U-boot 2010.12 串口调试工具 DNW/ SecureCRT 交叉编译工具 Arm-2009q3(gcc 4.4.1) 文件系统格式 RAMDISK, Ext4 GUI Google Android 4.0.4 ICS 软件功能支持 支持3D图形显像...
� Android 更像一款桌面环境为 Java 的 Linux 操作系统。有助于 Google 实现其 " 随时随地为每个人提供信 息 " 的企业战略。 HTC HTC HTC HTC Dream/G1 Dream/G1 Dream/G1 Dream/G1 具体配置 硬件 3.17 英寸 HVGA ...